Zur JKU Startseite
Zur JKU Startseite


Betreuung: Univ.-Prof. Dipl.-Ing. Dr. Bernhard Zagar
Beschleunigungssensoren finden durch deren fortschreitende Miniaturisierung immer größere Verbreitung in technischen Anwendungen.
Diese Projektseminararbeit beschäftigt sich mit einem digitalen 3-Achsen Beschleunigungssensor von STMicroelectronics. Dieser wird für das Messen des Erdbeschleunigungsvektors verwendet. Dadurch wird es möglich den Normalenvektor des Beschleunigungssensors, relativ zur Erdbeschleunigungsrichtung, zu bestimmen.
Die gemessenen Daten werden einem ATmega8-USB-Modul übergeben. Dieses berechnet aus den gemessenen Beschleunigungen die beiden Winkelfreiheitsgrade der aufspannenden (x-y)-Ebene des Beschleunigungssensors.
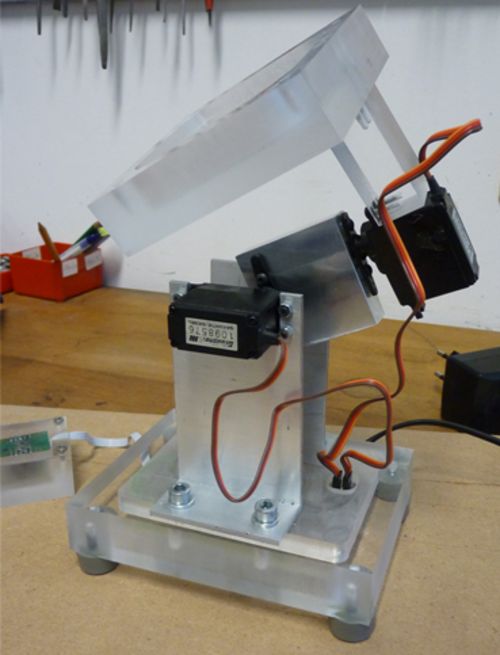
Der ATmega8 besitzt bereits drei integrierte PWM-Kanäle. Zwei von diesen werden genutzt, um ein den beiden Winkeln entsprechendes PWM-Signal auszugeben. Das PWM-Signal wird schließlich verwendet, um zwei Modellbauservomotoren anzusteuern. Diese beiden Motoren dienen als Aktuatoren eines kleinen mechanischen Aufbaus, der eine Ebene im Raum darstellen soll. Dadurch kann, durch Bewegen des Beschleunigungssensors, die Ebene in Echtzeit mitgedreht werden.
Es besteht die Möglichkeit einer Kommunikation zwischen dem ATmega8-USB-Modul und der USB-Schnittstelle eines PC. Dadurch konnten weitere Funktionen (z. B. das Ein-/Ausschalten der Plattform, die grafische Darstellung des Normalenvektors der Platine des Beschleunigungssensors,...) mittels Matlab implementiert werden.
Schlagwörter: Beschleunigungssensor, Echtzeitdatenverarbeitung, Servomotor
15. Dezember 2010