 Zur JKU Startseite
Zur JKU Startseite

Dipl.-Ing. Dr. Klaus Oppermann

Betreuer und 1. Begutachter: | Univ.-Prof. Dipl.-Ing. Dr. Bernhard Zagar |
2. Begutachter: | a.Univ.-Prof. Dipl.-Ing. Dr. Christian Magele, öffnet eine externe URL in einem neuen Fenster |
Rigorosum: | 19. September 2011 |
Die Arbeit entstand im Zuge eines FFG, öffnet eine externe URL in einem neuen Fenster-Projekts mit dem Titel “Robuster hochdynamischer Kraftsensor für die Landtechnik” unter der Projektnummer 814325 und wurde gemeinsam mit der Firma Pöttinger, öffnet eine externe URL in einem neuen Fenster durchgeführt. Der magneto-elastische Effekt wurde erstmals von E. VILLARI 1865 entdeckt und ist daher heute auch unter dem Namen Villari-Effekt bekannt. Umgesetzt wurde dieses Prinzip erstmals 1954 von der Firma ABB, öffnet eine externe URL in einem neuen Fenster, die den ersten kommerziell erwerblichen Sensor (Pressductors) auf den Markt brachte. Er zeichnet sich durch ein sehr hohes Signalllevel bei außerordentlicher Toleranz gegenüber Überlastungen und einem möglichen Betrieb, selbst bei härtesten Umgebungsbedingungen, aus. Leider hat dieser Aufnehmer auch Nachteile: Alterungseffekte, temperaturabhängige Empfindlichkeit, Nullpunktdrift und Hysteresefehler. Da für den Sensor von ABB Stahl als Sensormaterial verwendet wurde, stellte sich die Frage, ob man diesem Messprinzip mithilfe neuartiger smarter Materialien oder durch Verwendung moderner Signalverarbeitungstechnologien nicht zu einem breiteren Einsatzspektrum verhelfen kann.
Im Speziellen wird in dieser Arbeit ein neuartiger Kraftsensor auf Basis des magneto-elastischen Messprinzips in Kombination mit dem neuartigen smarten Material Terfenol-D entwickelt. Terfenol-D ist eine Seltene Erden Legierung aus Terbium, Dysprosium und Eisen. Terfenol-D wurde als Sensormaterial ausgewählt, da es einen sehr hohen magneto-mechanischen Kopplungsfaktor gegenüber dem bisher hauptsächlich verwendeten Material Stahl besitzt. Dieser Sensor soll alle Vorteile des Pressductors, wie hoher mechanischer Überlastfaktor und große Robustheit gegenüber Störungen behalten, es aber erhaluben, dass seine Nachteile mithilfe der digitalen Signalverarbeitung kompensiert werden.
Dazu wurde ein Prototyp, bestehend aus Sensor und Elektronik (siehe Abbildung 1), zur Auswertung des Sensorsignals, aufgebaut. Bei der mechanischen und elektrischen Charakterisierung des Sensorsystems wurde eine ausgeprägte Hysterese festgestellt. Daher ist das Kernkapitel dieser Arbeit das Themengebiet der Hysterese-Modellierung und deren Kompensation. Es werden viele Hysterese-Modelle wie z. B. das Preisach, das Jiles-Atherton und das Coleman-Hodgdon untersucht und auf Tauglichkeit zur Beschreibung der Hysterese des entwickelten Sensors evaluiert.
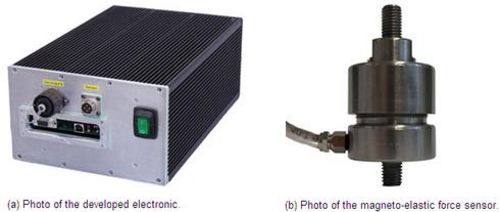 (a) Foto der für den Sensor entwickelten Elektronik. (b) Foto des assemblierten magneto-elastischen Sensors.
Abbildung 1: Foto der beiden Komponenten des magneto-elastischen Sensorsystems Sensor und Elektronik.
(a) Foto der für den Sensor entwickelten Elektronik. (b) Foto des assemblierten magneto-elastischen Sensors.
Abbildung 1: Foto der beiden Komponenten des magneto-elastischen Sensorsystems Sensor und Elektronik.
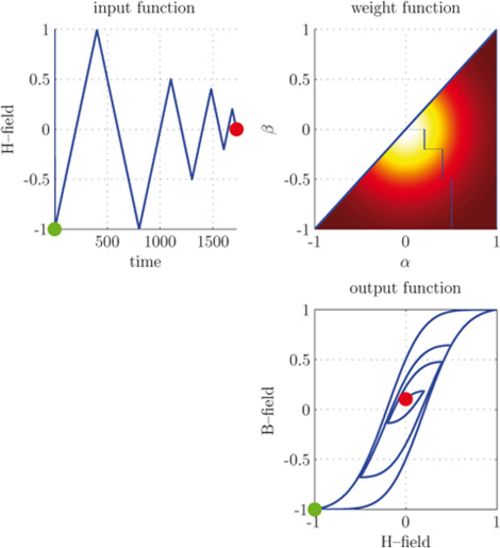 Abbildung 2: Darstellung des Preisach-Hysterese-Modells mit Gaußscher Gewichtsfunktion µαβ.In der linken oberen Abbildung wird der Eingang, in diesem Fall das H-Feld, dargestellt. In der rechten oberen Abbildung wird der Preisach-Operator γα,β mit der Preisach-Gewichtsfunktion µαβ farbcodiert im Hintergrund dargestellt. In der rechten unteren Abbildung wird die aus dem Eingang resultierende Hysterese dargestellt, wobei der grüne Punkt den Anfang der Hysterese und der rote das Ende der Hysterese beschreibt.
Abbildung 2: Darstellung des Preisach-Hysterese-Modells mit Gaußscher Gewichtsfunktion µαβ.In der linken oberen Abbildung wird der Eingang, in diesem Fall das H-Feld, dargestellt. In der rechten oberen Abbildung wird der Preisach-Operator γα,β mit der Preisach-Gewichtsfunktion µαβ farbcodiert im Hintergrund dargestellt. In der rechten unteren Abbildung wird die aus dem Eingang resultierende Hysterese dargestellt, wobei der grüne Punkt den Anfang der Hysterese und der rote das Ende der Hysterese beschreibt.
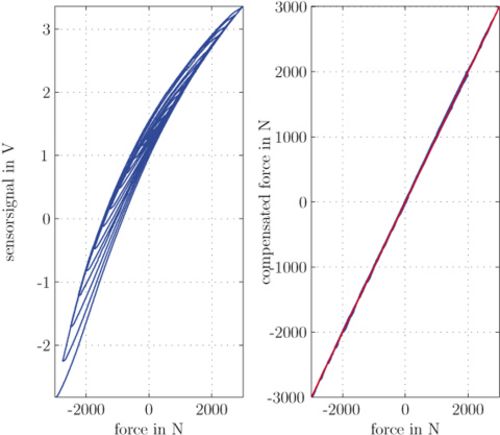 Abbildung 3: Aufnahme eines Messzyklus des magneto-elastischen Kraftsensors mit Echtzeit-Hysteresekompensation im DSP. In der linken Grafik ist das nicht kompensierte Sensorsignal und auf der rechte Seite ist das kompensierte Kraft-Signal des Sensors dargestellt. Die rote Linie stellt das Soll-Ergebnis der Kompensation dar.
Abbildung 3: Aufnahme eines Messzyklus des magneto-elastischen Kraftsensors mit Echtzeit-Hysteresekompensation im DSP. In der linken Grafik ist das nicht kompensierte Sensorsignal und auf der rechte Seite ist das kompensierte Kraft-Signal des Sensors dargestellt. Die rote Linie stellt das Soll-Ergebnis der Kompensation dar.
Im Zuge des Evaluierungsprozesses wurde das Preisach-Hysterese-Modell (siehe Abbildung 2) ausgewählt, dieses war aber bei der erforderlichen Genauigkeit zu rechenintensiv. Aus diesem Grund wurde dieses Modell soweit verbessert und weiterentwickelt, dass es den Anforderungen einer Echtzeit-Hysteresekompensation genügte. Diese entwickelte Erweiterung verringert den Fehler des Modells wesentlich und er möglicht somit die Verringerung des Diskretisierungslevels und reduziert damit den Rechenaufwand des Modells bei gleichem Modellfehler entscheidend. Wie bei jedem mathematischen Modell ist die Identifizierung der Parameter entscheidend für die Funktion des Modells, daher wurde für das weiterentwickelte Modell ein eigener Identifizierungsalgorithmus mit grafischer Benutzeroberfläche (GUI) entwickelt. Anschließend wurde diese Hysteresekompensation in den DSP, der in der Elektronik des Sensors inkludiert ist, implementiert. Dazu musste das Modell invertiert werden. Abschließend wurde das Sensorsystem inklusive Echtzeit-Hysteresekompensation mit einem komplexen Messzyklus verifiziert. Die mit diesem Sensorsystem erhaltenen Ergebnisse sind in Abbildung 3 dargestellt. In der linken Abbildung ist das unbearbeitete Sensorsignal und in der rechten Abbildung ist das mithilfe der Echtzeit-Hysteresekompensation berechnete Ergebnis dargestellt.
The circulation of the project work is restricted from September 6, 2011, for a period of 5 years.